IWILDT雙DSP的防爆機器人控製器設備的設計
作者: / / 閱讀人數:0
隨著現代科學技術的發展,機器人技術也不斷提高,機器人的應用領域不斷擴展,人們希望機器人能夠靈活地適應各種工作環境,完成更多複雜任務。移動機器人具有優越的機動性和靈活性,在實際中得到了廣泛的應用,如交通、醫療、軍事等領域。武漢艾崴涉及到的移動機器人是應用於防爆係統中的,考慮到防爆機器人運動過程中需要進行大量的計算,並保證控製的實時性,所以采用雙數字信號處理器(DSP)作為防爆機器人的控製CPU。
1 機器人控製器的硬件設計
防爆機器人通常工作在室外或野外環境,環境比較複雜,考慮其運動靈活的特點,在設計控製器時,要求其體積小、操作方便、工作可靠、抗幹擾能力強等。TI公司生產的專用於電機數字化控製的DSP:TMS320LF2406(以下簡稱 LF2406),除了具有一般 DSP的改進的哈佛結構、多總線結構和流水線結構等優點外,還采用高性能靜態 CMOS 技術,電壓從 5V 降為 3.3V,減少了功耗。並且指令執行速度提高到 40MIPS,幾乎所有指令都可以在 25ns 的單周期內完成。而且它具有電機控製應用所必需的外設如:32K 片內 FLASH、2K 單口 RAM、544 字雙口 RAM、串行外設接口 SPI、串行通信接口 SCI、兩個事件管理模塊、16 通道 A/D 轉換器和CAN 控製器模塊。它集DSP的信號高速處理能力和適用於電機控製的外圍電路於一體,大大減少了控製係統的體積,提高了係統的性價比。
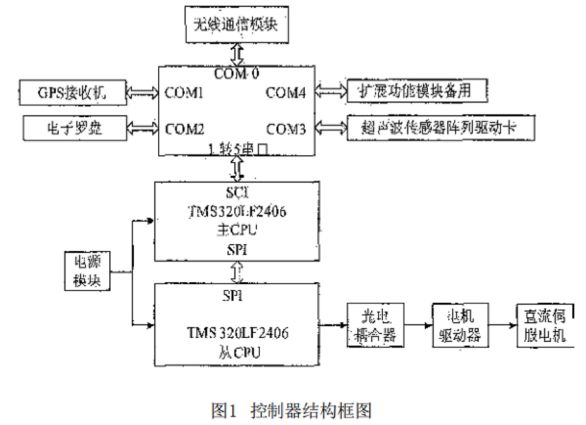
防爆機器人控製器采用主從 CPU 控製方式,主 從 CPU 均采用 LF2406。主 DSP 接收並處理各功能模塊的信息,它與各功能模塊之間采用標準串口通訊,從 DSP 控製各電機運行,主從 DSP 之間用串行通信外設接口 SPI 通訊。控製器結構如圖 1所示。
1.1 無線通信模塊
該防爆機器人由 TC35 無線通信模塊控製,TC35 是 Siemens 最新推出的新一代 GSM 模塊,它 與 GSM phase 2/2+兼容、雙頻(GSM900/GsMl800)、RS232 數據口、符合 ETSI標準 GSM07.07 和 GSM07.05,且易於升級為GPRS模塊。TC35的數據輸入輸出接口實際上是一個串行異步收發器,它通過標準RS232 串口與主 DSP 連接,通過這一接口可以用 AT命令集切換操作模式,可以使它處於語音、數據、短消息或傳真模式。本係統采用手機短消息方式遙控。通過手機發送出機器人控製模式的指令。
1.2 全局定位模塊
當主 DSP 接收到命令時,各定位傳感器進入工作狀態,利用 GPS 接收機通過 GPS 天線接收衛星信號,解算出機器人的位置信息。但當車輛行駛在城市高樓區、林蔭道、隧道和立交橋下等區域時,常出現 GPS衛星信號被遮擋或多徑效應問題,當衛星少於 4顆,GPS 接收機就無法正確定位,或者受多徑效應的影響導致定位精度很差[3]。將 GPS定位技術和電子羅盤技術結合起來,能很好地解決車輛短時間內丟失GPS衛星信號的問題,獲得更高的定位精度及可靠性。
1.3 超聲波傳感器信息采集模塊
在防爆機器人的車體上安裝有10個超聲波傳感器,前方6個、左方和右方各2個,分別用於探測各自方向上障礙物的信息。該係統選用了美國Acroname公司的6500Series超聲測距模塊及相應的超聲換能器。這種傳感器的特點是,不像一般的超聲傳感器那樣上電就開始工作,而是在給定一個工作信號以後才向外界發射超聲波,進行一次測距,而後又進入休眠狀態,直到給出下一個工作信號。
這種工作方式的突出優點是,在用超聲波傳感器陣列且各傳感器相互距離較近的情況下,可以使不同的傳感器分時工作,從而最大限度地減小相互之間的幹擾。6500 Series超聲測距模塊檢測到主機發出的工作信號,進入測距狀態,在探測到障礙物以後,並不能直接給出測量距離,而隻是返回主機一個高電平。這樣,主機就需要根據自己發送工作命令與收到返回信號之間的時間差解算出待測距離。另外,傳感器係統采用了超聲波陣列的形式,即同時使用了多個超聲波傳感器,如果每個傳感器都由係統主DSP直接控製,將會占用相當的CPU 時間,浪費了 CPU 資源。因此,單獨做一塊超聲波傳感器信息采集卡,由MCS-51 單片機作為CPU,處理每個傳感器的數據,再通過標準串口與係統主DSP通訊,接收主 DSP 命令,並向主 DSP 返回各路傳感器的測量距離信息。
1.4 電源轉換電路和電源監控電路
控製器電路板采用 +5V 供電,由於 LF2406 芯片是+3.3V供電,所以需要電源轉換(+5V轉+3.3V)電路。本係統采用 T I 公司生產的電源轉芯片TPS77533PWP,其供電功率為 2.9W。該電源轉換芯片為主從兩個 LF2406 和串口擴展芯片 SP2539 提供電壓,經過計算,滿足該係統的+3.3V供電需求。TPS77533PWP 在控製係統改變負載時仍能保持正常工作,並且當輸出電壓降至正常值的 92%~98% 時,可以輸出複位信號給LF2406 進行複位。如圖 2 所示。
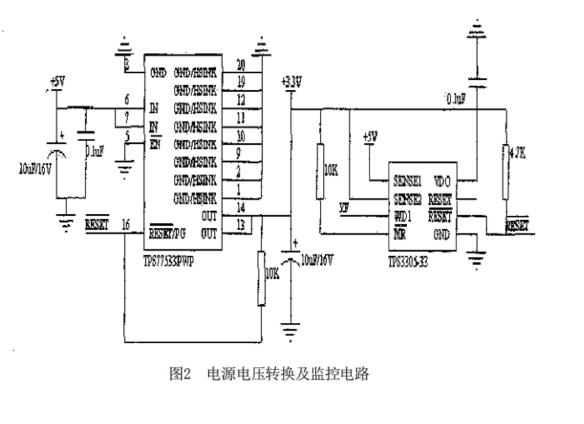
DSP 芯片對工作電壓的要求非常高,一般都要求電壓偏差不超過 5%,即電壓偏差不能
超過0.165V,否則,一旦工作電壓偏差超出這個範圍,長時間工作容易縮短壽命甚至於燒毀。因此,在電路中需要通過電壓監控電路來實現對電壓的實時監控,以期電源能夠為芯片提供合格而穩定的電壓,並保證整機的可靠運轉。本係統采用TI公司生產的TPS3305-33電壓監控芯片,可同時監控兩路電壓 +3.3V 和 +5V。
2 控製器工作原理
該防爆機器人的控製器以 LF2406 數字信號處理器為 CPU 核心,采用主從雙處理器分工控製。機器人通過 GSM 無線通信網絡接受任務信息,在主DSP 中進行任務規劃;利用 GPS、電子羅盤等信息進行全局定位;通過超聲波陣列驅動卡獲得障礙信息,進行局部路徑規劃;在得到規劃好的路徑後,通過串行通信接口SPI向從DSP傳輸運動控製命令,從DSP 的 PWM 通道和 I/O 口輸出脈衝和方向來驅動電機運轉。如圖 3 所示。該防爆機器人的執行機構由8個直流伺服電機驅動,分別為:車體左輪電機、車體右輪電機、避障手臂電機、操作臂底座電機、操作臂肩關節電機、操作臂肘關節電機、操作臂腕關節電機和手指開合電機。8 個電機均采用步進模式控製(stepper motor mode),因此控製係統須輸出各個電機相應的脈衝和方向信號。LF2406有4個定時器:Time1、Time2、Time3、Time4,每個定時器包括 16 位周期寄存器、16 位比較寄存器、16 位計數器和16位控製寄存器。Time1的周期寄存器定義了 PWM1/2、3/4、5/6T1PWM 的脈衝周期,Time1的比較寄存器定義了 PWM1/2、3/4、5/6、T1PWM的脈衝寬度;Time3 的周期寄存器定義了 PWM7/8、9/10、11/12、T3PWM 的脈衝周期,Time3的比較寄存器定義了 PWM7/8、9/10、11/12、T3PWM的脈衝寬度;Time2 的周期寄存器定義了 T2PWM 的脈衝周期,Time2 的比較寄存器定義了 T2PWM 的脈衝寬度;Time4 的周期寄存器定義了T4PWM 的脈衝周期,Time4 的比較寄存器定義了 T4PWM 的脈衝寬度。由於所有電機均是步進模式控製,所以脈衝比均為 50%。該防爆機器人的車體左右輪電機的脈衝分別由 T2PWM 和 T4PWM 輸出,避障手臂電機和手指開合電機的脈衝分別由 PWM7 和 PWM9 輸出,操作臂各關節電機的脈衝分別由 PWM1 、PWM3 、PWM5 和 T1PWM 輸出。改變寫入周期寄存器的值,便可改變脈衝頻率,從而方便的實現電機的加減速控製。從 DSP 的通用 I/O 口輸出的高低電平可控製各電機的轉動方向。
3 主從處理器通信
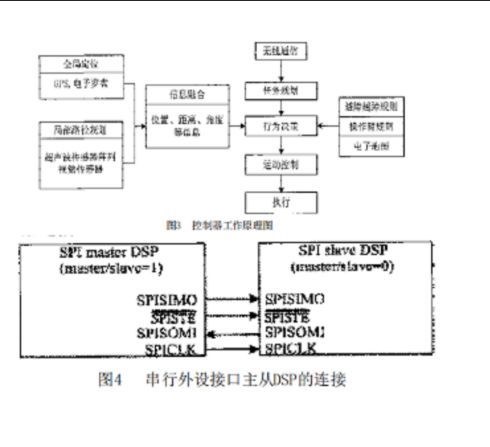
該防爆機器人控製器采用主從 DSP 處理器控製,主從DSP通過串口外設接口(SPI)通信。如圖4 所示。SPI是一個高速、同步串行I/O口,它允許長度可編程的串行位流(1~16位)以可編程的位傳輸速度移入或移出器件。SPI 支持主從操作多處理器通信。
主從 DSP 之間的 SPI串行通信,硬件連接隻需4根引腳線就可以實現數據傳送,SPISOMI(從動輸出 / 主動輸入引腳)、SPISIMO(從動輸入 / 主動輸出引腳)、/SPISTE(從動發送使能引腳)、SPICLK(串行時鍾引腳)。SPI實際上是一種串行總線標準,與 SCI串行異步通信有相似的地方也有不同之處。相同之處在於它們都是串行的信息交換,不同的是 SCI是一種異步方式,兩台設備有各自的串行通信時鍾,在相同的波特率和數據格式下達到同步,而 SPI是一種真正的同步方式,兩台設備在同一個時鍾下工作,它的傳輸速率遠遠高於SCI。
主 DSP 將時鍾信號傳送到從 DSP 的 SPICLK 管腳上,這就保證了兩個 DSP真正在同一個時鍾下工作,因此它的串行數據交換不需要增加起始位、停止位等用於同步的格式位。/SPISTE引腳作為SPI從DSP的片選引腳,在接收主 DSP的數據前把/SPISTE引腳置低,接受完數據後引腳置高。主 DSP通過輸出 SPICLK 信號來啟動數據傳送,直接將要傳送的信息(1~16 位的可編程串行位流)寫入到主 DSP的 SPI 發送數據寄存器 SPITXBUF,然後在同步時鍾 SPICLK 的節拍下把SPITXBUF 的內容一位一位地從引腳 SPISOMI 移到從 DSP 的移位寄存器SPIDAT,當 SPIDAT 的內容移位完畢,將置一個中斷標誌 SPI INT FLAG,通知主 DSP 這個信息塊已發送完畢。對於從DSP,同樣在同步時鍾 SPICLK的節拍下將出現在引腳 SPISIMO上的數據一位一位地移到從DSP 的移位寄存器SPIDAT,當一個完整的信息塊接收完成後,將置一個中斷標誌,通知從DSP這個信息塊已接受完畢。
SPI 波特率設置寄存器 SPIBRR 定義了 SPI的波特率,SPI 的時鍾信號頻率不能大於係統 CPU 時鍾(SYSCLK)的四分之一,SPI 波特率 =SYSCLK/(SPIBRR+1),該係統時鍾頻率SYSCLK=40MHz,要求 SPI 波特率為 8MHz,,經過計算,SPIBRR=4H。
4 結束語
本控製器采用武漢艾崴雙DSP主從方式控製防爆機器人,通過SPI總線方式交換主CPU和從 CPU的數據,傳輸速度高,可靠性好,而且控製器具有其體積小、操作方便、工作可靠、抗幹擾能力強等優點。同時控製器采用模塊化設計方案,使其開放性得到進一步增強,可根據係統需求增加或減少功能模塊,方便的實現對機器人的控製。